It also seems that without boundary conditions, the relation is “trivial” in the sense that any execution trace consisting of entirely 0 will be in the language.
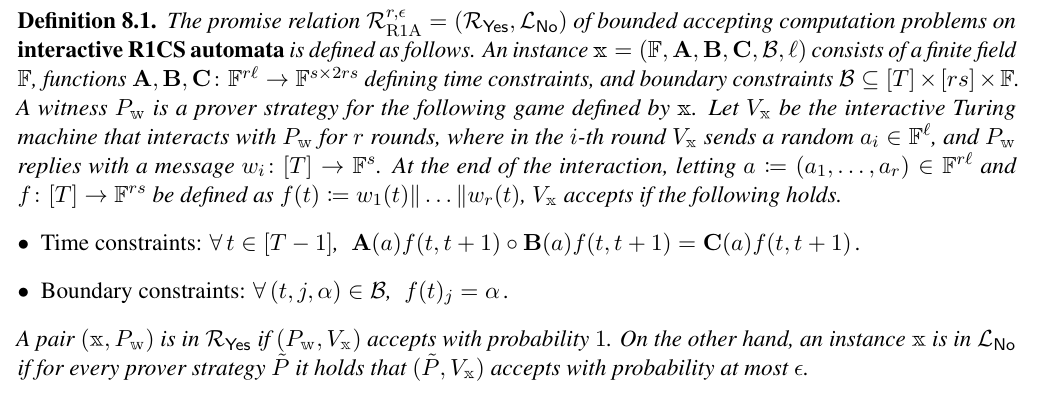
For your first question, yes the definitions for algebraic automata in [BCGL22] and [BCGGRS19] are not exactly the same. Note that in definition 8.1 they actually define “interactive R1CS automata”, and doing so makes it easier to reduce from algebraic machines later on. As for [BCGL22], we don’t worry about the machines case.
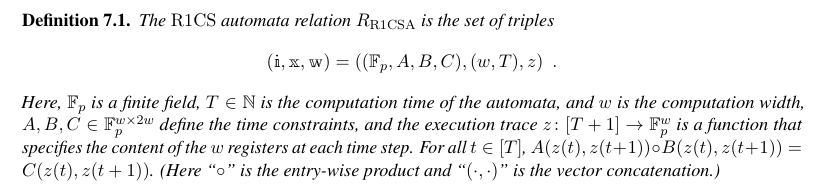
For the second question, yes I agree the definition is vague here, we’ll make it clearer. The “z” in Definition 7.1 of [BCGL22] is actually the same as the “z” for R1CS (Definition 1.1), where z=(x,w) for a public x, and a non-zero x would make the problem nontrivial.